ComHawk
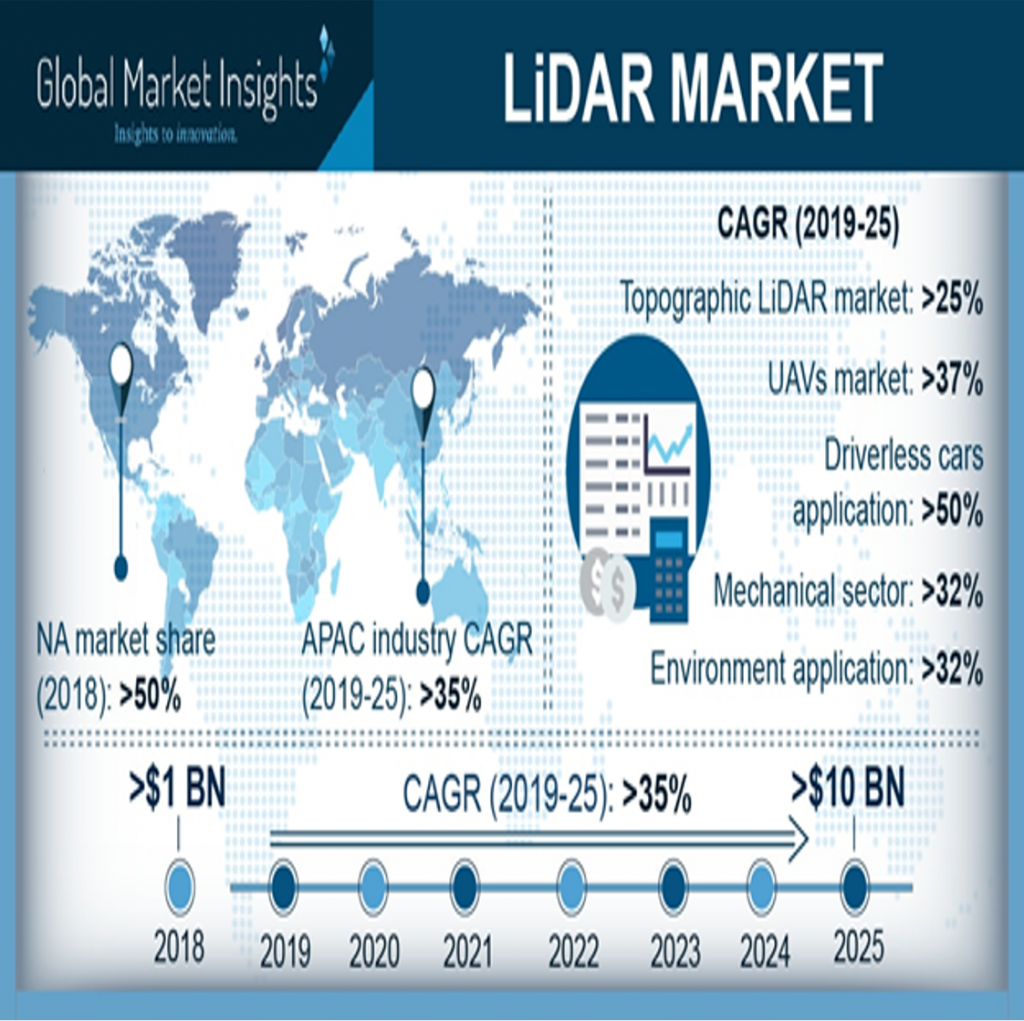
巿場上有兩個很熱門的 LiDAR 話題. 一個是 Tesla 的 Musk 發出的重磅消息. 在自駕車風起雲湧時, AI 控制車行, 帶領巿場上一陣的 AI 熱潮. 但 AI 運算的車行資料, 有兩派的分歧. 一派是當道的 Tesla. 伊隆.馬斯克一直都是立體攝影鏡頭的擁護者, 且認為鏡頭是自駕車的唯一解方. 然而由先前的堅決反對 LiDAR , 轉而決定投向 LiDAR 的懷抱
重打臉馬斯克 特斯拉擁抱LiDAR陣營 內幕曝光
LiDAR 將引領 3D 影像風潮. 為此, iPhone 12 Pro 鏡頭上新增了 LiDAR 感測器. 因為有了 LiDAR,不只能拍攝平面「照片」,還可感測周圍的 3D 立體環境,將畫面中物件的遠近、深度都變成數據,並且快速建模,讓影像變得立體化,讓人 360 度環視、運用。
獨/直擊工程師使用iPhone 12 Pro掃描效率高的原因是LiDAR
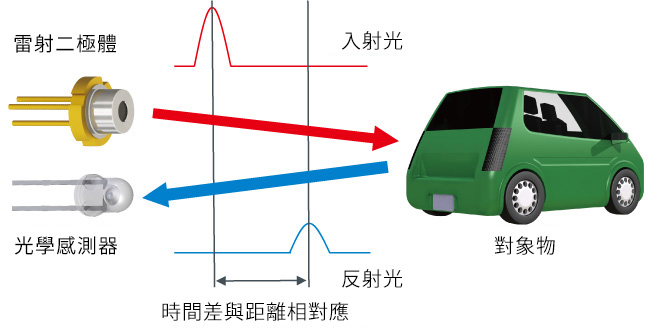
LiDAR 是 Light Detection And Ranging(雷射探測與測距)的縮寫
光學雷達,或簡稱光達,是一種光學遙感技術,它通過向目標照射一束光,通常是一束脈衝雷射來測量目標的距離等參數
在自駕車的應用上, 鏡頭雖可清楚辨識物體大小、顏色等特徵,但卻易受光線、天氣影響;而雷達雖在夜間仍可正常運作,但在材質方面仍有諸多限制,許多汽車會同時安裝測速雷達或通訊天線,其發射的電磁波容易造成測距雷達誤判;
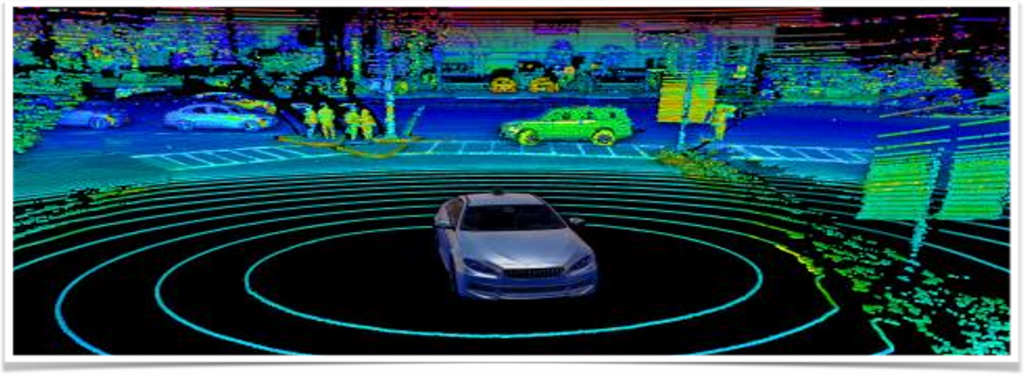
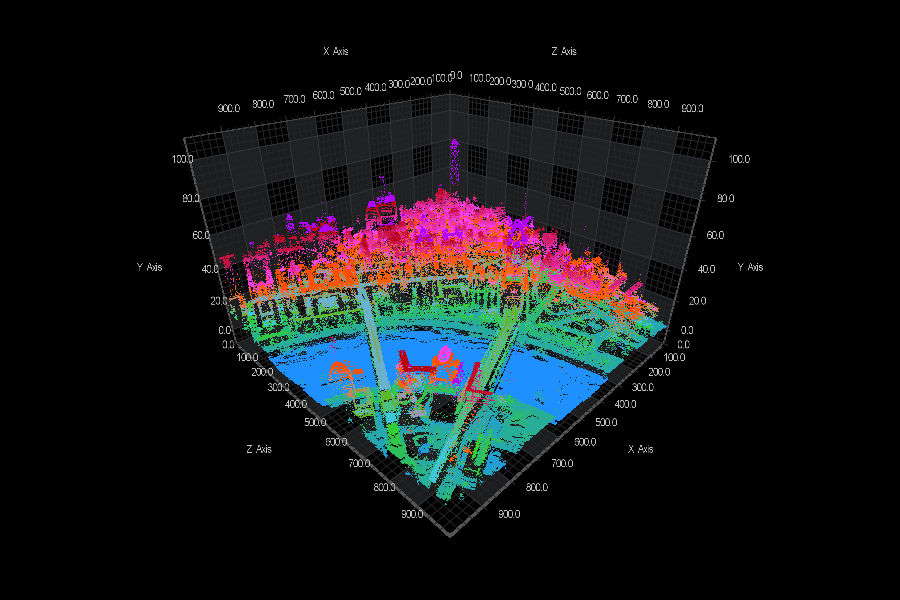
反觀光達,由於其發射的雷射光因波長較短、能量較集中,故擁有更好的解析度,能更高精度地測得距離、辨識物體外型,可深測高達200公尺左右的距離,並能實現釐米等級的測量精準度,此外,因不受環境光線、亮度所影響,可以不分晝夜地感測周遭障礙物形狀、距離等資訊,建立周遭3D地理資訊模型。
原因無他, 只有它能快速地測量其他車輛或障礙物的距離、方向和速度。降低駕駛人的傷害風險.未來的自駕車更需要鏡頭、雷達、光達等多項感測器相輔相成,在當前的自駕發展中,包括毫米波雷達、超音波雷達、鏡頭等感測器確實已普遍應用在車體上,而光達究竟什麼優勢,何以成為目前自駕車發展的重中之重?
傳統光達因採用機械式旋轉,透過360度旋轉發射頭,將速度更快、發射更準的雷射光從線變成面,並在豎直方向上排列多束雷射光,形成多個面,達到動態3D掃瞄並動態接收訊息的目的,但不論是光學系統或機械旋轉系統都所費不貲,早期一台至少要七.五萬美元,且體積龐大,只能安裝在車頂上。
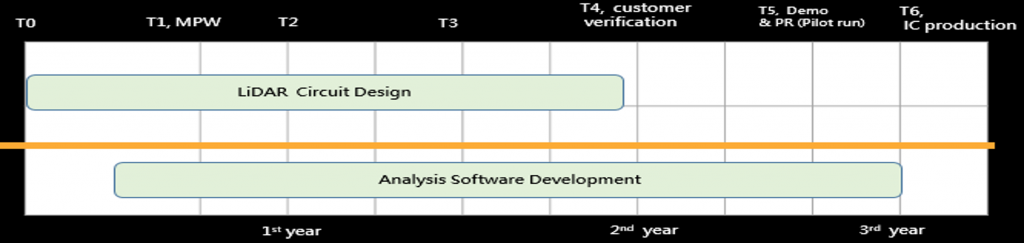
固態光達及混合固態光達領域是極具發展潛力的技術. 我們專攻於光學相控陣列(Optical Phased Array; OPA)藉由光相位矩陣改變雷射光發出角度,以實現廣角掃描功能,因無需使用旋轉、移動元件,可更大幅度縮小體積、降低售價SOC 的開發架構, 也讓效率更快, 體積更小
IC 設計團隊. 由位於美國矽谷與台灣的碩博士團隊組成. 至少皆具有15 年以上設計的經驗. OPA(光學相控陣列) 團隊由具有開發實物經驗的博士領導.
我們尋求資金方合作, 共同開創一個新的技術藍海
我們期待您看到這樣的訊息. 和我們聯絡. 我們會很樂意為您說明我們的計劃.
brianhsu@comhawk.com 886-919-631-958
riverhsu@comhawk.com 886-906-008-292